Your comments
Не сомневаюсь в искренности других ораторов, но мне так и не удается "найти общий язык" с D10. Появилась возможность - решил познакомиться с датчиком по-ближе. Построен он на базе трехосевого акселерометра от Bosh, данные с которого интерпретирует микроконтроллер PIC, забирая их по шине I2C. В роде бы все просто и ломаться особо не чему, но даже будучи варварски закрепленным скотчем к неподвижному столу - датчик все равно дает необъяснимые сработки. Мне даже подумалось, что может акселерометр неисправен, но при подключении к нему другим микроконтроллером он адекватно отвечал на запросы, отдавал значение ускорений по осям. Могу предположить, что может быть были разные ревизии датчиков или прошивок микроконтроллера - других вариантов объяснений тому, почему у одних пользователей работает, а у других - нет, я не вижу. В общем для меня история по-прежнему не закончилась.
9 years ago
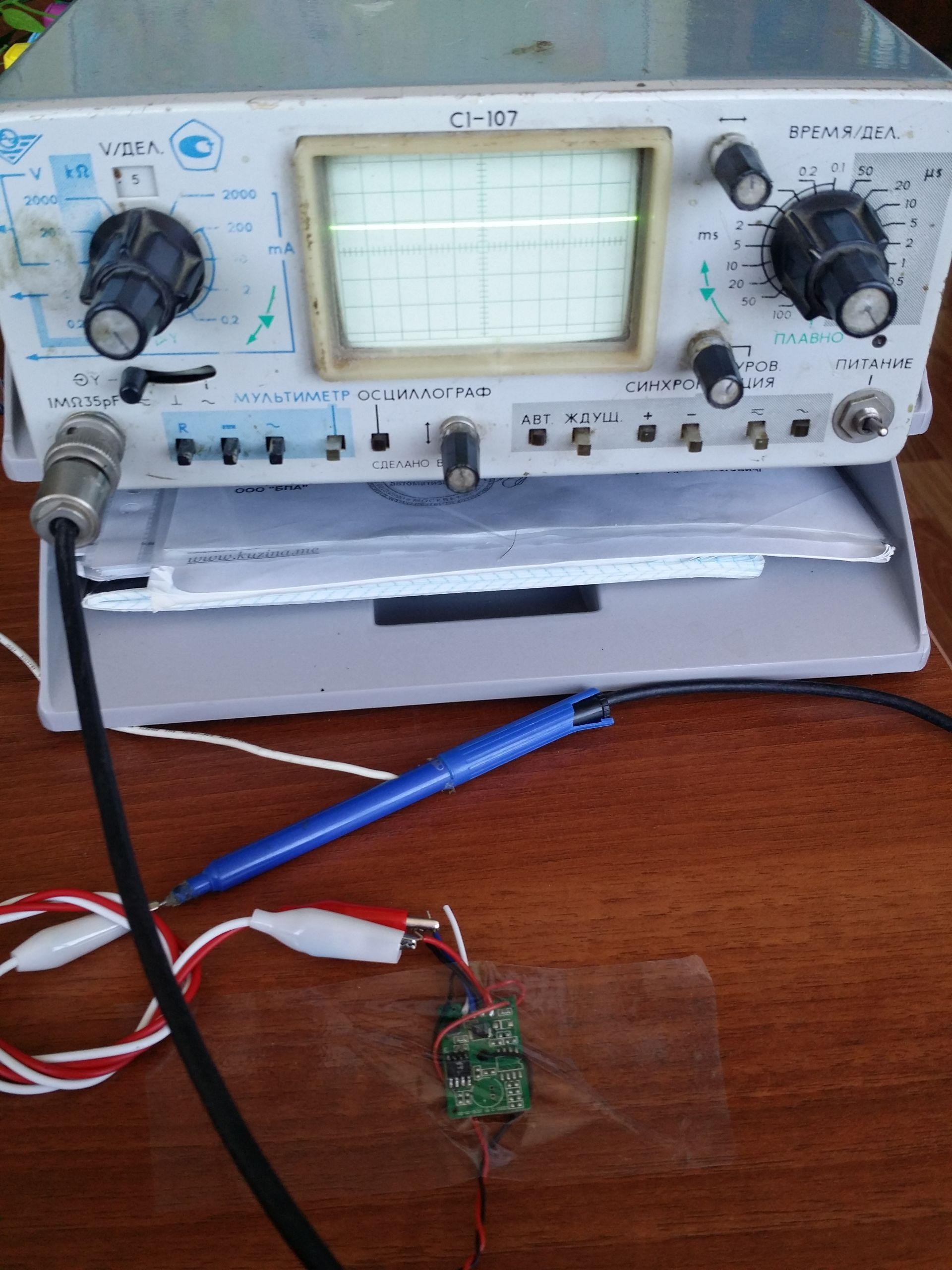
:))) Так вот же она:
Желтоватый датчик расположен более выгодно (на мой взгляд), нежели синий. Если по делу- перенос датчика в тестовом режиме на верх торпеды положительных изменений не принес. Поэтому на текущий момент датчик программно отключен "до лучших времен", точнее до того времени, когда появится возможность с ним опять повозиться.
Желтоватый датчик расположен более выгодно (на мой взгляд), нежели синий. Если по делу- перенос датчика в тестовом режиме на верх торпеды положительных изменений не принес. Поэтому на текущий момент датчик программно отключен "до лучших времен", точнее до того времени, когда появится возможность с ним опять повозиться.
Спасибо за агрументированный ответ, как вариант попробую ваши предложения при первой возможности. Хотя у меня и есть определенные сомнения (правда не подтвержденные практикой, как в вашем случае):
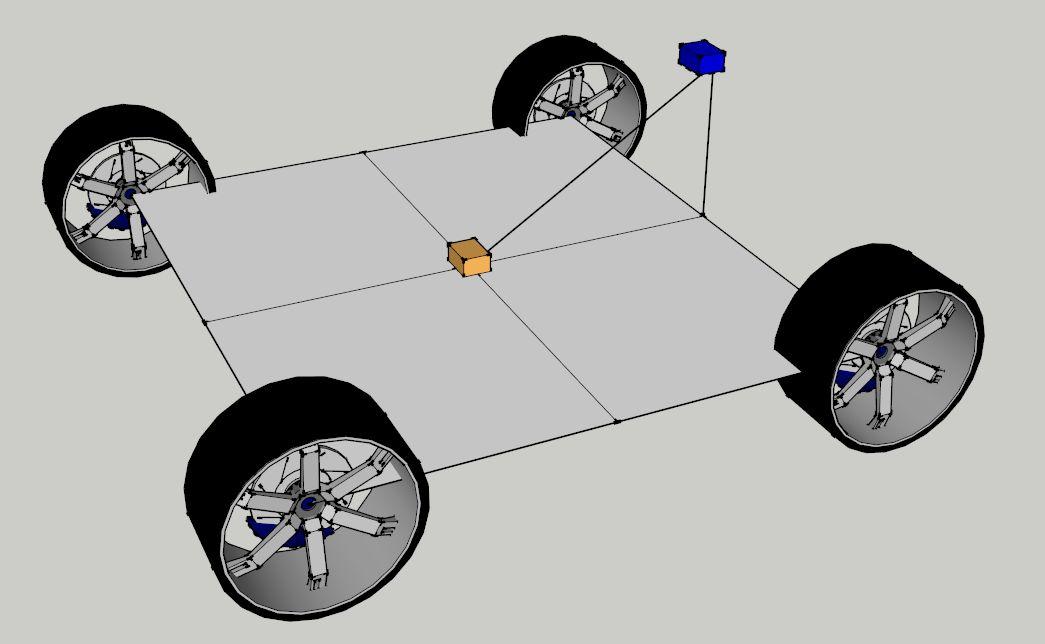
- Вы правильно говорите про ось поворота и рычаг, но увеличивать этот рычаг можно перемещая датчик как в вертикальной плоскости(подняв на торпеду), так и в горизонтальной (разместив максимально далеко от сей колес-по центру автомобиля). Первый вариант показан на картинке красными линиями, второй синими. Как мы видим в первом случае рычаги для передней и задней оси получаются неравномерными, да и по горизонтали перемещать можно на большее расстояние, чем по вертикали (обычно длина автомобиля больше, чем высота).
- Датчик хоть и интеллектуальный, но как он может определить свое положение, требуемый коэффициент усиления, при отсутствии колебаний-изменений его положения? Т.е. исходя из вашей логики если датчик закреплен абсолютно жестко(не испытывает колебаний ни в какой плоскости), в любом месте, в любом положении, то он в любом случае выйдет на максимальную чувствительность.
Добрый день, сегодня установил D10 в дополнение к стандартному датчику удара, подключив к одному из входов M32 CAN. Перед установкой тоже видел в интернете отзывы 50/50, без внятных причин - у кого-то работает сразу и без проблем, у кого-то нет. Видимо я попал во вторую категорию. Датчик установлен на металл тоннеля ручника, горизонтально, практически в центре автомобиля, закреплен при помощи клея из термопистолета (максимально жестко), сверху датчика штатный ковролин, пластиковый кожух ручника (не касается). Длина провода от датчика до блока M32 около 50 см, по прямой, без изгибов, на пути отсутствуют пересечения с жгутами штатной проводки. Установка произведена в холодном боксе, машина после установки из бокса не выезжала, салон не прогревался. Плюс питания постоянно на датчике, минус подается с одного из выходов М32, при постановке на охрану. Белая жила (неиспользуемая) висит в воздухе. Сразу после постановки на охрану датчик ведет себя смирно, ожидание 3-5 минут ситуации не меняют, на поддомкрачивание автомобиля реагирует адекватно (включает тревогу). Но если оставить автомобиль под охраной на более длительный срок, то происходят массовые ложные срабатывания с интервалом 2-3 минуты (отключил тревогу по этому датчику, но заставил М32 слать мне смс по сработке - так и установил). При этом машина на ручнике в пустом боксе, сейсмоативности у нас нет =).
Понимаю, что датчик на интеллектуальный, на хорошей элементной базе - должен работать. Как его" вывести на чистую воду", что ему может мешать? Могут ли сработки быть вызваны наводками от GSM? Имеет ли смысл экранировать кабель или сам датчик? Можно ли "заземлить" неиспользуемую жилу?
Понимаю, что датчик на интеллектуальный, на хорошей элементной базе - должен работать. Как его" вывести на чистую воду", что ему может мешать? Могут ли сработки быть вызваны наводками от GSM? Имеет ли смысл экранировать кабель или сам датчик? Можно ли "заземлить" неиспользуемую жилу?
Customer support service by UserEcho